games101课程笔记13-Ray Tracing
光追,启动!
开始之前:为什么要使用光线追踪?
因为光栅化(rasterization)不能很好地解决全局光照里的一系列问题:
- 软阴影
- 光线弹射不止一次时的情况
- 磨砂质感(glossy reflection)物体上的环境映射
- 间接光照计算
Whitted-Style Ray Tracing
前置:对光线的设定
- 光沿直线传播,并且本身就是直线
- 光线没有碰撞现象(即使两条光线交叉时)
- 光线具有可逆性(光路是可逆的)
光线渲染
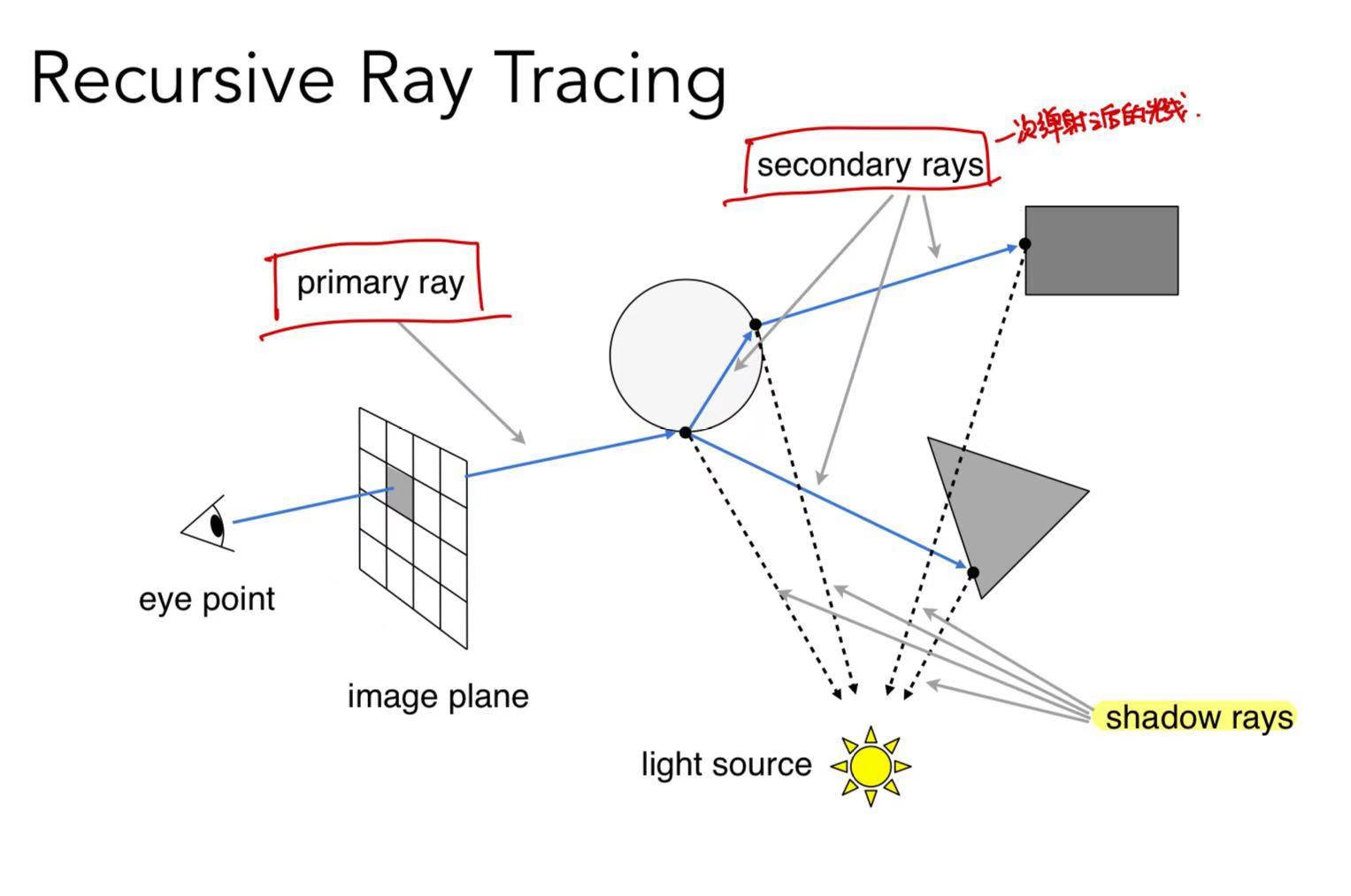
因为光路是可逆的,所以这里假设光线是由眼睛发出的,并由光源接收(这里假设眼睛和光源都是一个点)
视线(视点出发经过成像平面的一个像素点的射线)可以分为两个部分:primary ray和secondary rays(包含所有经过反射和折射的线路)。
在视线和物体相交后,将交点和光源连线(这条线称为shadow rays)如果这条线段没有被遮挡,则可以认为这一部分是可以照亮的。
然后将所有的颜色叠加起来可以算出这个像素点的颜色。
如何计算射线和表面的交点
射线由原点(origin)和方向组成,可以表示为:
$$
r(t)=o+td(0≤t<+∞)
$$
其中,t表示时刻。
光线和隐式表面的交点
隐式表面上的点满足:
$$
P:f(P)=0
$$
联立射线方程,可以解得交点:
$$
f(o+td)=0
$$
你将得到,所有满足实根、正根要求的就是要求的交点。
如何计算射线和网格的交点
一个规律:从平面上的点为原点射出一条射线,如果点在网格内,那么这条射线和网格的交点为奇数个;如果点在网格外,那么这条射线和网格的交点则为偶数个。
简化这个问题:
- 忽略光线和平面平行的情况,此时光线和平面的交点只有0和1两种。
计算射线和三角形的交点
方法一
分为两步:
- 求光线和平面的交点
- 判断这个交点是否在三角形内
平面可以由一个法向量N和平面上的一个点P'表示,平面上的点P可以表示为:
$$
P:(p-p’)·N=0
$$
和之前一样,联立射线方程,可以解得相交时间t。
$$
t=\frac{(p’-o)·N}{d·N}(0≤t<+∞)
$$
方法二 Möller Trumbore Algorithm(MT算法)
另外,还有一种一步到位的方法。射线和平面的交点可以表示为重心坐标的形式,联立可得:
$$
o+td=(1-b_1-b_2)P_o+b_1P_1+b_2P_2(b_1,b_2,1-b_1-b_2,t≥0)
$$
代入三角形顶点的三个维度的坐标,可以获得一个线性方程组(可以使用克拉默法则解出),得到t,b1,b2。
方法三(求交加速方法,使用包围盒(Bounding Volumes))
用简单的形状将物体框起来,在光线和三角面片求交前先确保光线能够碰到包围盒。
包围盒是由三组对面(slab)形成的交集
常使用Axis-Aligned Bounding Box(AABB)这种包围盒,这个包围盒的几个平面与坐标轴平面是平行的。这时,求解射线和平面的交线时只需考虑单个维度的计算即可(因为平面总是和轴平面是平行的),大大减少了计算量。
如何求光线和包围盒的交点呢?
求出光线和三组对面的交点,记录射线和对面交点的进入点和离开点。
然后取这三组交点的交集,满足:
$$
t_{enter}=max(t_{min}),t_{exit}=min(t_{max})
$$当且仅当满足这个要求时,认为光线是和包围盒相交的:
$$
t_{enter}<t_{exit},t_{exit}≥0
$$
加速结构(承接上文的bounding box)
Uniform grid
将场景划分为网格,通过网格判断光线与物体的相交情况。
构建uniform grids的步骤为:
- 找到包围盒
- 创建grid
- 存储每个对象到格子里
此时,判断光线是否与物体相交的问题转换为先判断光线是否与格子相交,然后判断是否与各自内的物体相交
这里需要考虑grid的分辨率的问题:
- 如果resolution太小,则失去了划分的以意
- 如果resolution太大,则会降低效率
anyway,格子通常只适用于规整的场景,相反,物体位置较为稀疏的场景就不适用这种划分方案,因为此时很多格子都不存储物体,大量时间被浪费在了光线与格子的求交上。
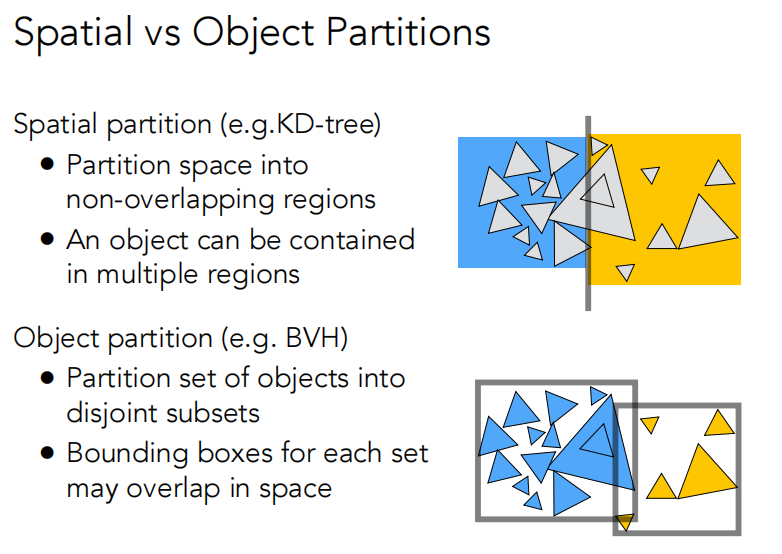
Spatial Partition
通常有Oct-Tree(八叉树) 、KD-Tree 以及 BSP-Tree 三种划分方案
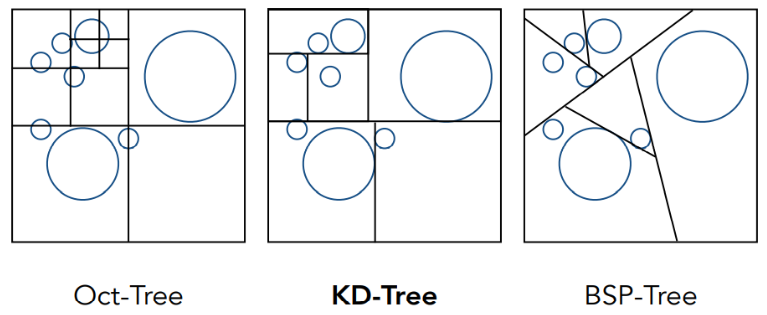
- Oct-Tree:每次迭代都将区域沿着坐标轴切分为均匀八块,按一定规则停止切分(如切分得到的区域中,只有一块含有物体;或此时的区域已经较小)
- KD-Tree:按坐标轴顺序交替切分,每次划分总会在原来的区域上生成新的区域
- BSP-Tree:每次都是沿着一定方向进行切分(非水平或竖直)
最实用的是KD-Tree

Data Structure for KD-Tree
中间节点存储的信息有:
- 沿着划分的轴
- 切分的平面信息
- 子节点的指针
叶子节点存储的信息有:
- 切分区域内的物体列表
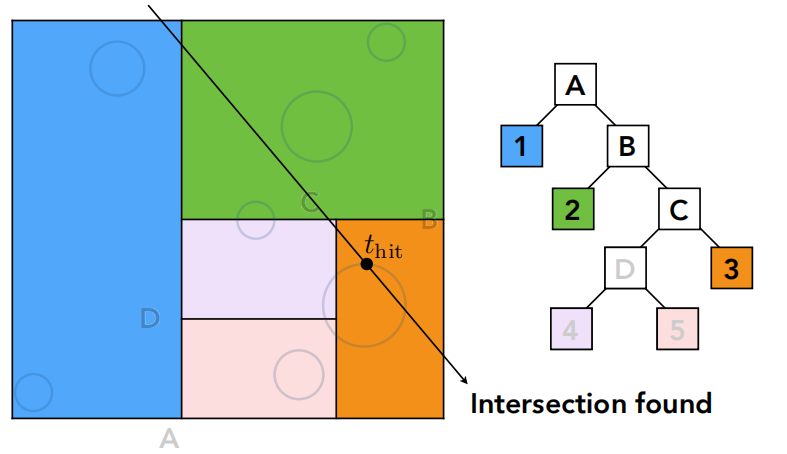
Traversing a KD-Tree
- 发射光线从根节点出发,分别判断光线与左右节点是否相交,若相交则进入2;否则,则与节点不相交
- 递归判断相交直至叶子节点,若与叶子节点相交,进入3
- 挨个判断叶子节点存储物体与光线的相交情况
Problem
- 很难判定三角形是否和包围盒有交集(很难实现)
- 一个物体可能会存储在多个格子里,不够只管
Object Partition & Bounding Volume Hierarchy (BVH)
为了解决KD-Tree的痛点,更换一种划分方法,即在场景中对物体进行划分,此时就不用考虑三角形与包围盒的求交问题
它本质是将一个场景用一个包围盒包住,然后按照一定划分方案将盒子划分成不同的子区域,不同子区域都需要包含三角形,最终划分到叶子节点时,每个叶子节点就包含了一些三角形,即包含了对应的一些物体:

优缺点
- 优点
- 一个物体只会出现在一个格子里面
- 格子之间可能会相交(尽可能让重叠的部分小一些)
Building BVHs
划分的三种方法(在格子中物体个数小于一定值时停止):
- 按轴的顺序交替划分(KD-Tree)
- 按最长的边进行划分
- 在物体三角形数目的最中间对物体进行划分(这里的最中间指的是划分后,两边的三角形数目基本一致)
Data Structure
- 中间节点(Internal nodes):该节点对应的包围盒和子节点的指针
- 叶子节点(Leaf nodes):该节点对应的包围盒和包围盒里面的物体列表
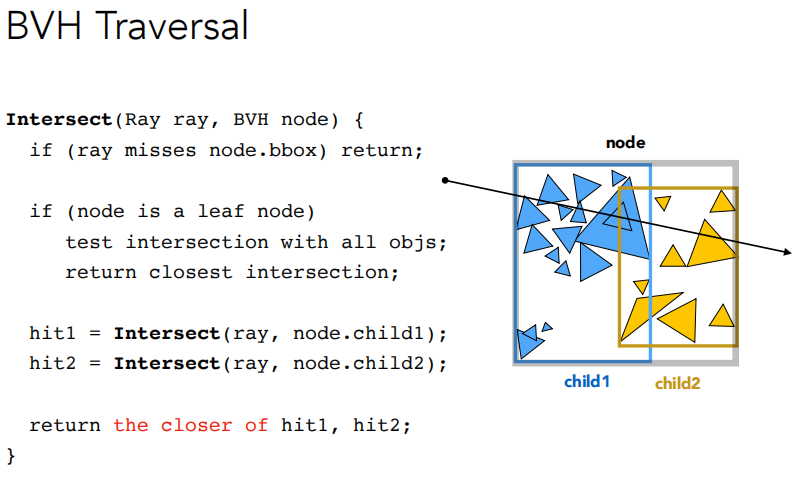
BVH Traversal
使用递归的方法
Spatial vs Object Partition
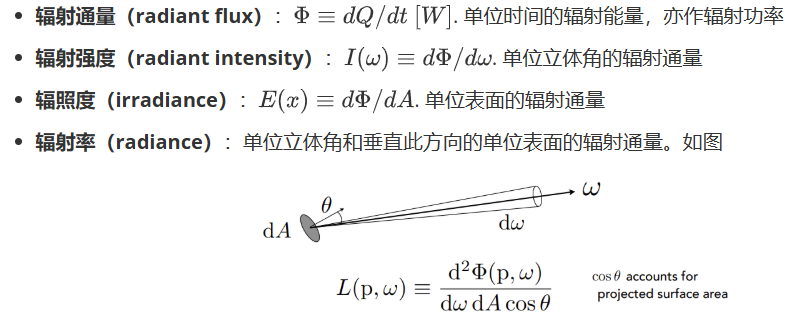
Radiometry