games101_hw1
hw1中使用矩阵表示变换过程的数学推导过程。
MVP变换
modle矩阵
模型变换的任务是要让物体放入视景体内。
在这个hw中,是通过绕z轴的旋转实现的。
view矩阵
视图变换的任务是要调整视图的位置,使物体在成像的中间位置。
通过调整视点的位置实现。
projection矩阵
投影变换的任务是先把投影变换的视景体改为正交变换的视景体(将四棱柱的底面和侧面向内压缩),然后对视景体进行正交投影变换,投影为NDC坐标系上的图像。
提供的参数有视角fov,宽高比aspect_ratio,近平面n,远平面f。
改变视景体的矩阵
按照特殊到一般的思想,先寻找同一切面上的点的关系(变换后两个点在x轴上的坐标是相同的)
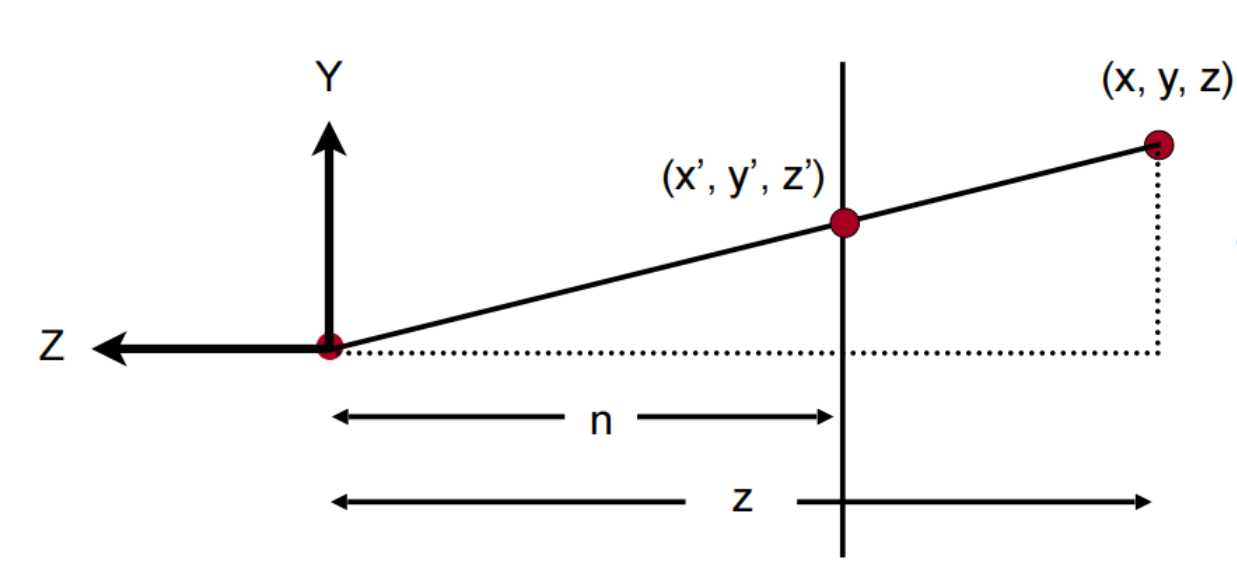
可以得到
$$
y’=\frac{n}{z}y
$$
同理,可以得到
$$
x’=\frac{n}{z}x
$$
在齐次坐标系下,使用第一步变换矩阵,可以使
$$
坐标 (\begin{matrix} x \\ y\\ z \\ 1 \end{matrix}) 变换为 (\begin{matrix} nx/z \\ ny/z \\ z’ \\ 1 \end{matrix}),也就是(\begin{matrix} nx \\ ny \\ z’z \\ z \end{matrix})。
$$通过这个表达式,可以猜出一些这个
4*4变换矩阵的参数,也就是
$$
M_(persp→ortho)=(\begin{matrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ a & b & c & d \\ 0 & 0 & 1 & 0 \end{matrix})
$$
还剩第三行的参数还没有得到,就要做到了!可以得到
z'z=ax+by+cz+d,根据常识可以得到x和y的坐标值对z是没有影响的,故a=0, b = 0。所以剩下的就是
z'z=cz+d。根据解方程的思想,有两个未知数,就得要两个方程才能解。
由于,顶点在近平面和远平面上时,变换后
z坐标是不会变的(z'=z),故进行带入。$$
n^2=cn+d ① \\
f^2=cf+d ②
$$
联立,解得
$$
c=n+f, d=-nf
$$也就是说!视景体变换矩阵为:
$$
M_(persp→ortho)=(\begin{matrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ 0 & 0 & n+f & -nf \\ 0 & 0 & 1 & 0 \end{matrix})
$$
正交投影变换矩阵
这一个变换矩阵需要将长方体的视景体压缩为边长为1的立方体,并且这个立方体的中心为世界坐标系的原点。
可以求得视景体的高
h为h=n*tan(fov/2)*2,宽w为w=h*aspect\_ratio,深度z为z=f-n(注意这里的符号,z是指向负方向的)。故,可以得到正交投影的变换矩阵为:
$$
M_ortho=(\begin{matrix} 2/w & 0 & 0 & 0 \\ 0 & 2/h & 0 & 0 \\ 0 & 0 & 2/z & -(n+f)/2 \\ 0 & 0 & 0 & 1 \end{matrix})
$$
视口变换
简单来说,是调用了void rst::rasterizer::draw(rst::pos_buf_id pos_buffer, rst::ind_buf_id ind_buffer, rst::Primitive type)这个函数,先绘制三角形的三个顶点,然后进行连接。
绘制顶点
对存储的顶点应用MVP变化矩阵
对顶点进行屏幕空间转换
这里对每一个顶点进行了深度值偏移的操作,具体代码为:
1
2
3
4
5
6
7
8// 深度值缩放
float f1 = (100 - 0.1) / 2.0;
float f2 = (100 + 0.1) / 2.0;
//....
for (each vert){
//....
vert.z() = vert.z() * f1 + f2;
}f1和f2的作用是将深度值 $$z$$ 从 [-1, 1] 的归一化设备坐标范围映射到设定的深度范围内(比如 [0.1, 100] )- 首先,将归一化深度值
vert.z()乘以缩放因子f1,将深度值的范围从 [-1, 1] 扩展到 [-49.95, 49.95]。 - 然后,加上
f2进行偏移,使范围变为 [0.1, 100]。
- 首先,将归一化深度值
绘制顶点
连接
- 使用插值的方法
PS. 绕固定轴旋转
具体思路:先将轴转到与z同方向,然后转动角度angle后,再将轴转回去。
假设轴为Vector3f axis,转动角度为angle
计算将轴转到z方向的矩阵可以分解为两步:先将轴转到zOx面上(绕x轴),然后转到z轴上(在xOz面上转动)
可以得到转动角度为:
$$
tan(\theta)=axis[1]/axis[2]
$$同理,可以得到第二步的转动角度为:
$$
sin(\alpha)=(-1) * axis[0]
$$