games101课程笔记05-Rasterization
在课程中,假定一个像素表示一个纯色的方块(;´д`)ゞ
viewport transformation(视口变换)
屏幕
- 由像素点构成
- 在这门课程中,像素定义为纯色的小方块,由三原色混色成
- 离散的
- 二维的
屏幕空间(视口变换)
- 像素的坐标为整数的x, y
- 像素坐标表示范围是(0, 0) - (width - 1, height - 1)
- 像素(x, y)表示的是像素的中心(x + 0.5, y + 0.5)
- 屏幕覆盖的范围是(0, 0) - (width, height)
- 忽略z轴
- 将小方块上的坐标由[-1, 1]^2映射到[0, width] * [0, height]
光栅化
将三角形作为基本的形状
- 三角形是最基本的多边形
- 能够构成其他的多边形
- 一定是在一个平面上
- 有完善的插值方法
经典问题:如何判定一个点在三角形内:叉积!
如何优化判定性能:
- 使用包围盒,减少遍历范围
- Incremental Triangle Traversal(增量三角形遍历?)适用于细长和经过旋转的三角形。
- 计算得到每一像素行里最左端和最右端的像素点。
反走样!
采样理论
采样被广泛应用在计算机图形学中(光栅化),不仅可以对不同的位置进行采样,也可以对不同的时间片进行采样。
采样过程中产生的不希望的东西被称为sampling artifacts,通常为锯齿(jaggies)、摩尔纹(moire)、马车车轮错觉(wagon wheel illusion)等。
产生这种sampling artifacts的原因是信号改变过于快,但是采样频率过低导致的。
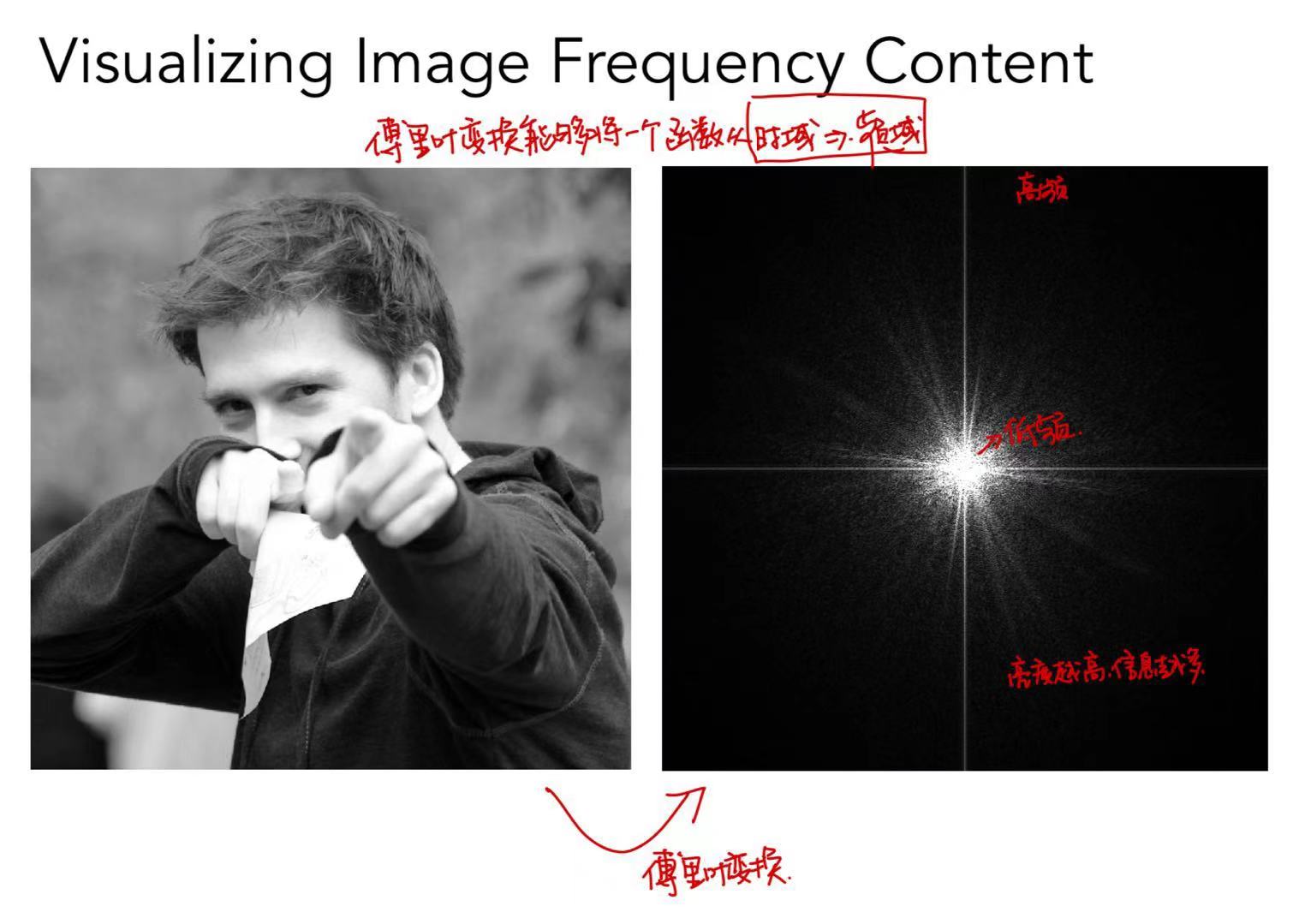
频域
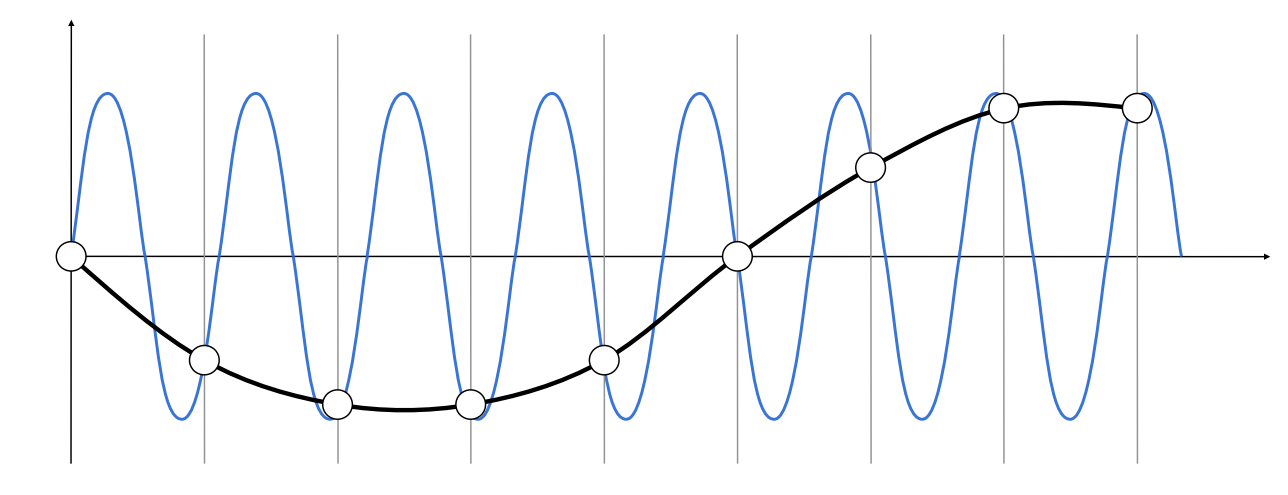
傅里叶变换使用正弦函数和余弦函数逼近某一个函数的过程,其中,这些正弦和余弦函数代表不同的频率。
通过傅里叶变化及其逆变换,可以实现在时域和频域之间的转换。
其中,采样的频率应该要与函数的频率相匹配,否则就会出现走样(aliases)的情况,即是用同样方法采样不同频率函数,得到的结果完全相同。
滤波
滤波,就是去除某些频率的内容。
高通滤波(high-pass filter):只剩下高频信息,对应在时域中只剩下边界信息(线条两侧发生畸变的部分)
低通滤波(low-pass filter):只剩下低频信息
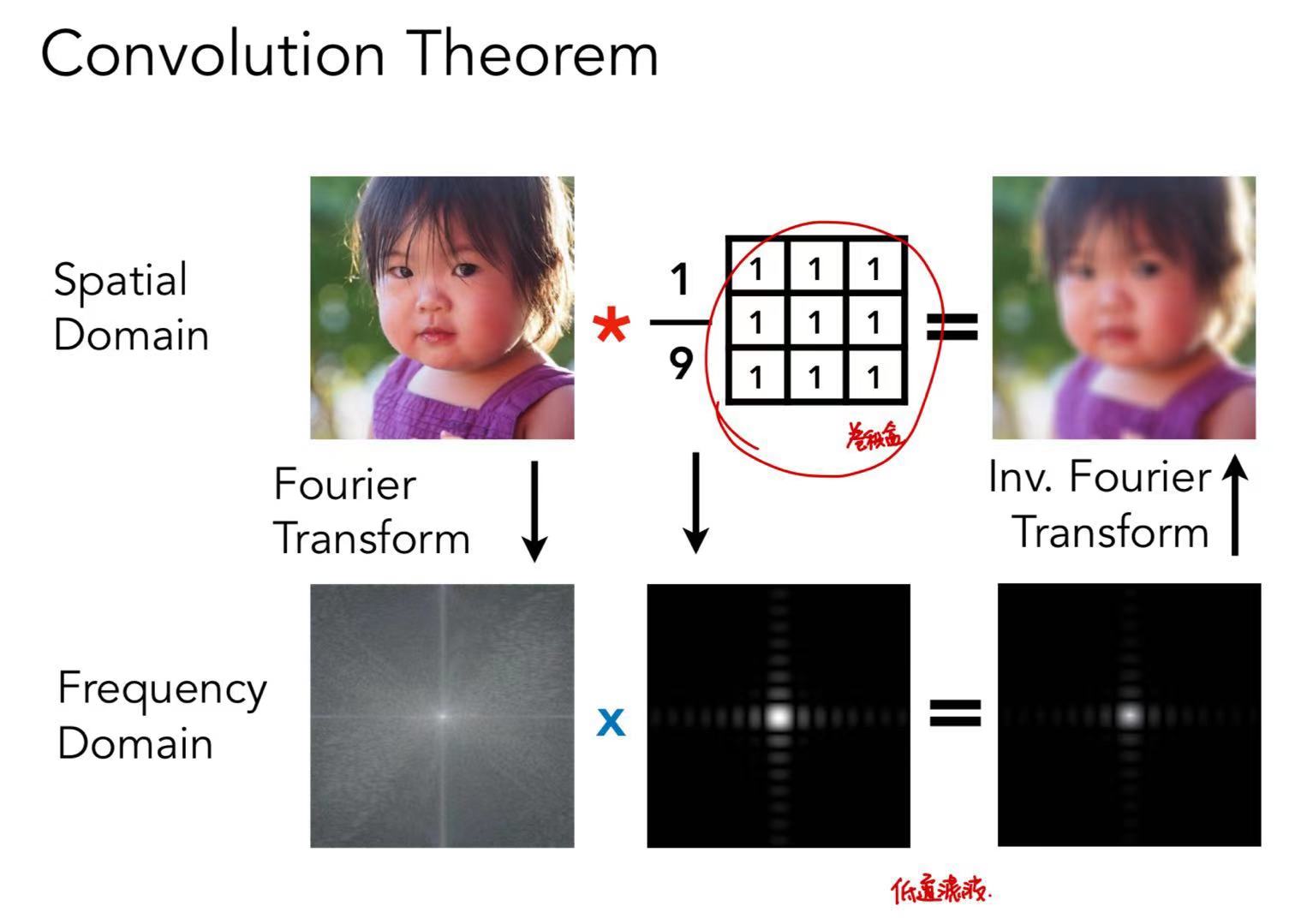
滤波 = 卷积 = 求平均值。
对物体对应时域的卷积 = 对物体对应频域的乘积,反之 对物体对应时域的乘积=对物体对应频域的卷积 也成立。
如图所示,对图像做卷积的过程也就是在去除图像的高频信息,最终结果是变得模糊。
如何减少sampling artifacts
增加采样率
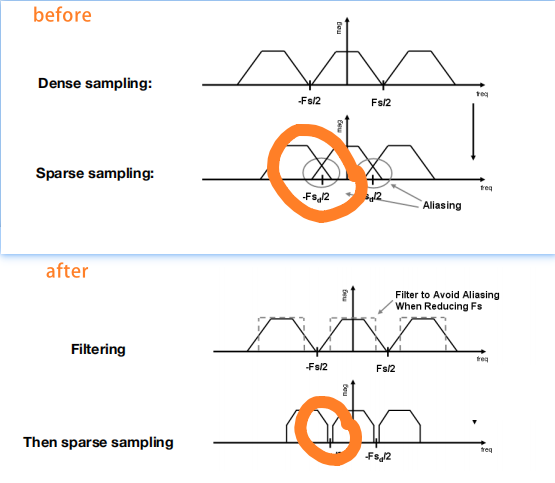
反走样
去掉图像的高频信息再采样。
如图所示,再滤波后,因为采样频率低造成的频谱混叠现象就不存在了。
反走样的方法
MSAA(Antialiasing By Supersampling)超采样
将一个实际的像素划分为多个虚拟的小像素进行采样,开销很大!
- 超采样(super smpling)和超分辨率(super resolution)本质上是相同的,但不是同一件事情
- 都是想要从低分辨率变成高分辨率
- 普遍面临采样频率不够的问题
- 可以使用深度学习的方法 DLSS(Deep Learning Super Sampling)
- 超采样(super smpling)和超分辨率(super resolution)本质上是相同的,但不是同一件事情
与时俱进的方法
FXAA(Fast approximate AA)
在硬件上进行改进,FXAA将像素的提取和混合过程交由GPU 内的ALU执行
TAA(Temporal AA)
TAA的原理是利用相机抖动和历史帧信息来增加像素的采样数,广泛应用于引擎中
可见性/遮挡问题(visibility/occlusion)
画家算法(Painter’s Algorithm)
由远及近画物体。
需要对物体根据深度排序,所以时间复杂度为O(nlogn)。
但是不能解决物体重叠的情况。
Z-Buffer
不能处理透明物体的深度!!
思想:
- 存储屏幕空间上每一个像素上可以采样到的最小深度值。
- 需要额外的深度缓冲。
- 帧缓冲(frame buffer)存储颜色值
- 深度缓冲(z-buffer)存储深度值
具体实现:
遍历每一个三角形的每一个像素,如果其深度值为最小值,则更新深度缓冲和帧缓冲对应像素的深度值和颜色值。
复杂度
- z-buffer算法的时间复杂度为O(n)。(只是记录了每一个像素值对应的最小深度,没有进行排序操作)。
- z-buffer算法和遍历三角形的顺序无关(排除同一像素上有相同深度三角形像素点的情况)