games101课程笔记03-Transformation
transformation相关的内容(二维变换、三维变换、viewing 变换)
仿射变换(Affine Transformations)
仿射变换 = 线性变换 + 平移(translate)
用一个二维坐标表示二维平面上的点,可以有等式:
$$
(\begin{matrix} x’\\ y’\end{matrix})=(\begin{matrix}a & b \\c & d \end{matrix})(\begin{matrix} x \\y \end{matrix})+(\begin{matrix}t_x \\ t_y \end{matrix})
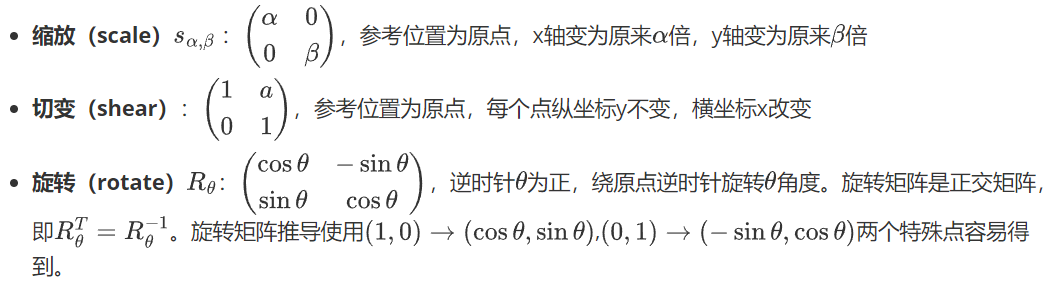
$$其中,二维平面线性变换可以细分为:旋转(rotation) + 缩放(scale) + 错切(sheer)
齐次坐标
- 向量具有平移不变性(保证向量在经过平移变换后自身保持不变)
- 2维点 = (x, y, 1)^T
- 2维向量 = (x, y ,0)^T
- 向量与点的加减法(当w方向的值为1/0时)
- 向量 + 向量 = 向量
- 点 - 点 = 向量
- 点 + 向量 = 向量
- 点 + 点 = 两点的中点
- 向量具有平移不变性(保证向量在经过平移变换后自身保持不变)
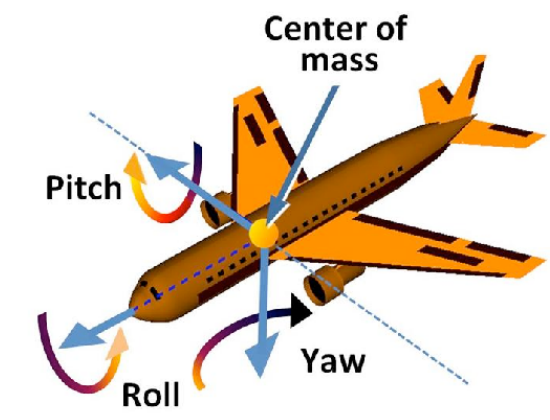
3D旋转的表示
欧拉角
rodrigues‘ rotation formula
四元数
viewing transformation
MVP变换
MVP变换的组成:
model transformation 模型变换(模型空间 -> 世界空间)
placing objects
view transformation/camera transformation 视图变换(世界空间 -> 观察空间)
placing camera
一般来说,可以将照相机放在指定位置(pos: 原点;up:Y,look at:-Z),然后移动物体的位置。
如何将照相机移动到指定位置?第一步,将相机的位置移动到原点;第二步,因为旋转矩阵是正交阵,故可以先写出从原点固定位置到现在位置的变换矩阵,然后求解逆运算旋转矩阵R’。
projection transformation 投影变换(观察空间 -> 裁剪空间)
projection transformation
orthographic projection(cuboid to “canonical” cube [-1, 1]^3)NDC坐标系!
一种可行的理解
- 照相机处于原点,朝向-z方向,朝上方向为y
- 去掉物体在z方向上的坐标
- 通过移动和缩放将结果限制在[-1, 1]^2的矩形内
P.S. -z方向为z轴的正方向,所以在数值上,近平面 > 远平面
perspective projection(frustum to “canonical” cube)
通过寻找特殊值的方式,可以找到将透视投影上的物体转换到正交投影的变换矩阵。
所以,求解透视投影的方法是先转换为正交投影,然后再根据正交投影的特性进行计算。
$$
M_{persp}=M_{ortho}M_{persp->ortho}
$$
更进一步地来说,可以分为这两个步骤:- 将四棱台变为长方体。就是把顶面不动,把底面以及侧面向内压缩为一个长方体。
- 对长方体进行正交投影变换。
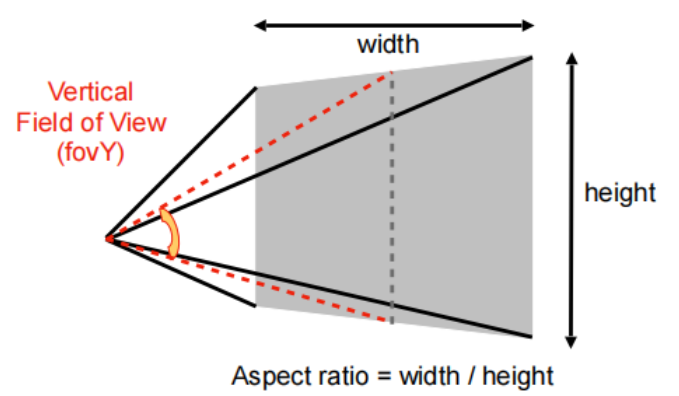
定义视景体的方式
垂直可视角度 fovY
近平面 zNear,zFar
宽高比 Aspect ratio
!important
具体的公式推导见hw1笔记